6.4.5 URDF工具
在 ROS2 中,提供了一些URDF文件相关的工具,比如:
check_urdf命令可以检查复杂的 urdf 文件是否存在语法问题;urdf_to_graphviz命令可以查看 urdf 模型结构,显示不同 link 的层级关系。
当然,要使用工具之前,请先安装,安装命令:sudo apt install liburdfdom-tools。
1.check_urdf 语法检查
进入urdf文件所属目录,调用:check_urdf urdf文件,如果不抛出异常,说明文件合法,否则非法。
示例,终端下进入功能包 cpp06_urdf 的 urdf/urdf 目录,执行如下命令:
check_urdf demo05_exercise.urdf
urdf 文件如无异常,将显示urdf中link的层级关系,如下图所示:
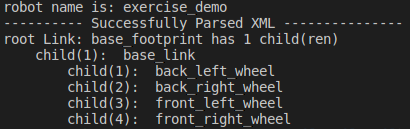
否则将会给出错误提示。
2.urdf_to_graphviz 结构查看
进入urdf文件所属目录,调用:urdf_to_graphviz urdf文件,当前目录下会生成 pdf 文件。
示例,终端下进入功能包 cpp06_urdf 的 urdf/urdf 目录,执行如下命令:
urdf_to_graphviz demo05_exercise.urdf
当前目录下,将生成以urdf中robot名称命名的.pdf和.gv文件,打开pdf文件会显示如下图内容:
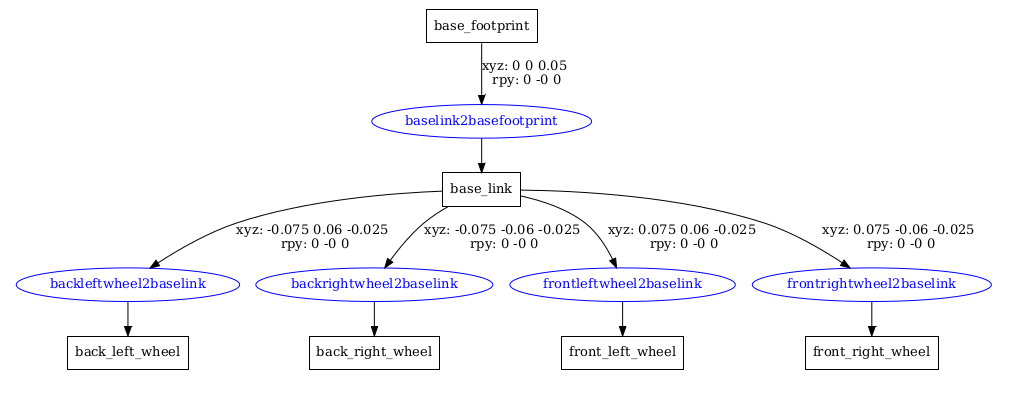
在上图中会以树形结构显示link与joint的关系。
注意:该工具以前名为urdf_to_graphiz现建议使用urdf_to_graphviz替代。