5.5 坐标变换工具
在 ROS2 的 TF 框架中除了封装了坐标广播与订阅功能外,还提供了一些工具,可以帮助我们提高开发、调试效率。本节主要介绍这些工具的使用,这些工具主要涉及到两个功能包:tf2_ros和tf2_tools。
tf2_ros包中提供的常用节点如下:
static_transform_publisher:该节点用于广播静态坐标变换;
tf2_monitor:该节点用于打印所有或特定坐标系的发布频率与网络延迟;
tf2_echo:该节点用于打印特定坐标系的平移旋转关系。
tf2_tools包中提供的节点如下:
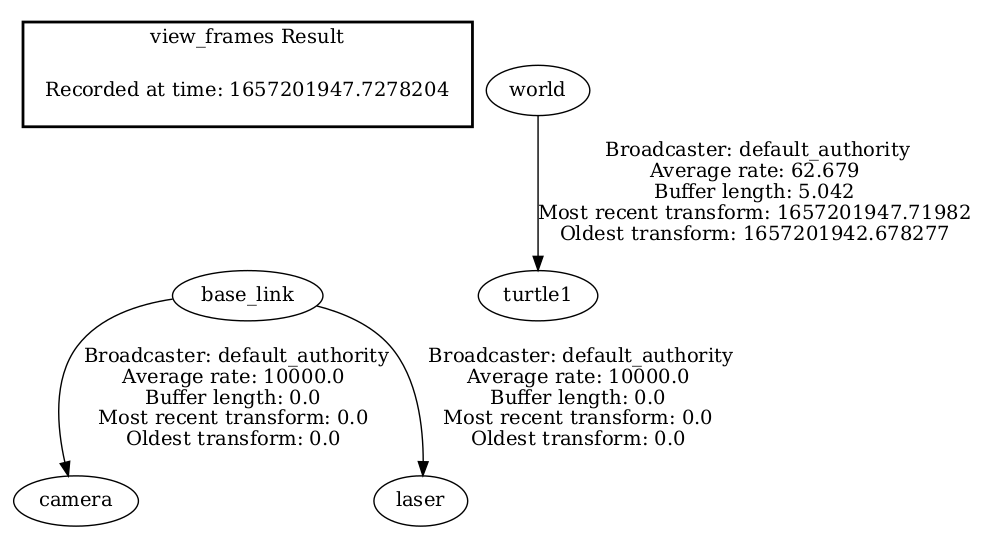
- view_frames:该节点可以生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
上述诸多工具中,功能包tf2_ros中的static_transform_publisher节点在 5.3.2 静态广播器(命令)一节中已有详细说明,本节不再介绍。
准备工作:
为了更好的演示工具的使用,请先启动若干坐标系广播节点,比如:可以按照5.3.2 静态广播器(命令)和 5.3.5 动态广播器(C++)广播一些坐标系消息。
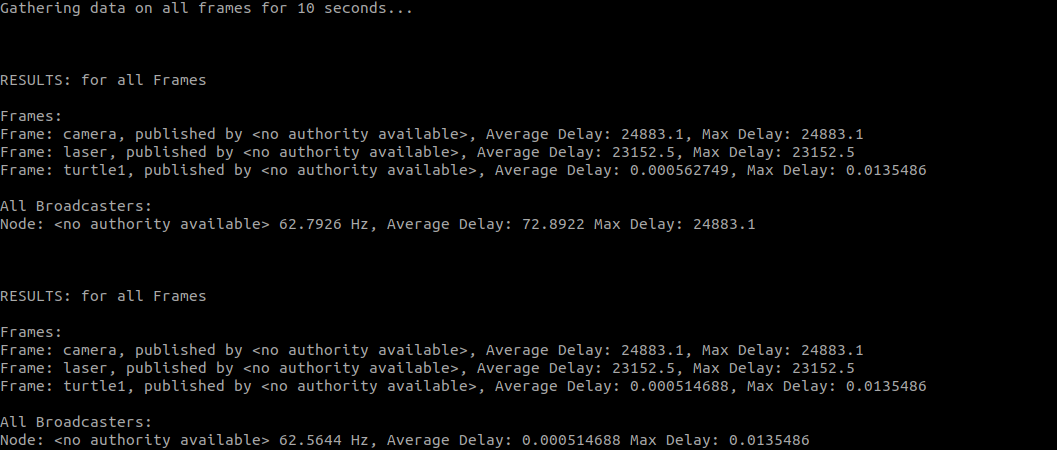
1.tf2_monitor
1.1打印所有坐标系的发布频率与网络延迟
终端执行命令:
ros2 run tf2_ros tf2_monitor
运行结果:
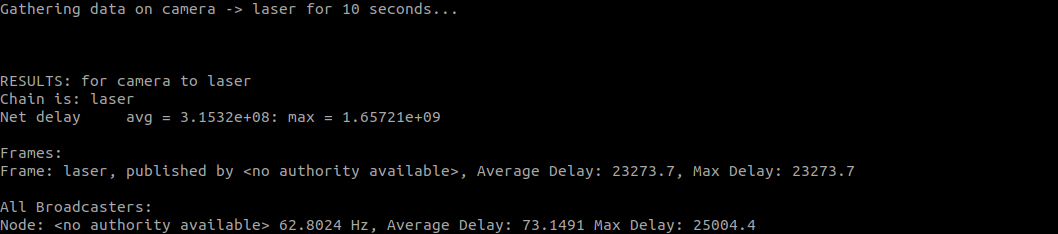
1.2打印指定坐标系的发布频率与网络延迟
终端执行命令:
ros2 run tf2_ros tf2_monitor camera laser
运行结果:
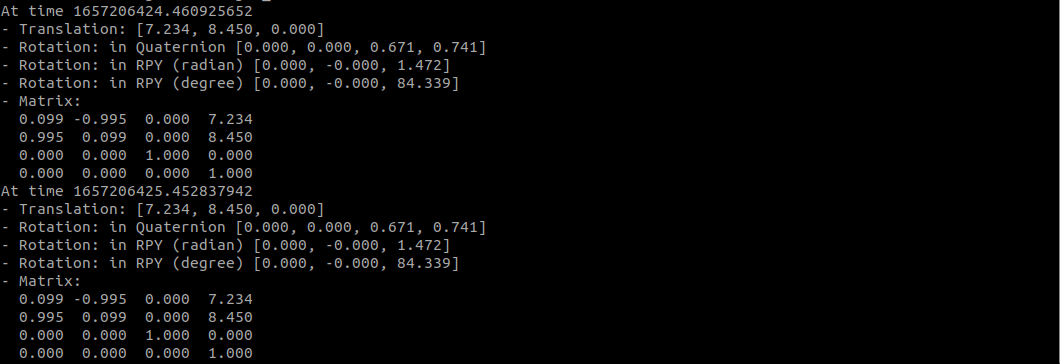
2.tf2_echo
打印两个坐标系的平移旋转关系。
终端执行命令:
ros2 run tf2_ros tf2_echo world turtle1
运行结果:
3.view_frames
以图形化的方式显示坐标系关系。
终端执行命令:
ros2 run tf2_tools view_frames
运行结果:将会生成 frames_xxxx.gv 与 frames_xxxx.pdf 文件,其中 xxxx 为时间戳。打开 pdf 文件显示如下内容: