6.3.1 案例以及案例分析
1.案例需求
需求:在 rviz2 中显示一个简单的盒状机器人。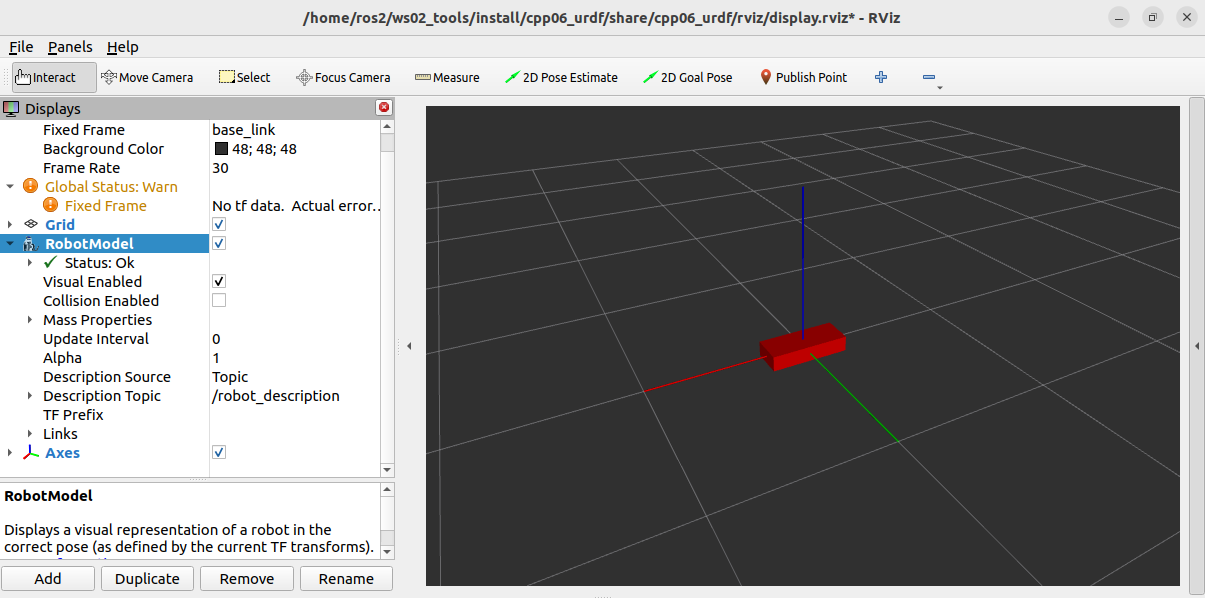
2.案例分析
在上述案例中,需要关注的要素有三个:
- 如何编写 URDF 文件;
- 如何加载 URDF 文件到系统;
- 如何使用 rviz2 显示机器人模型;
3.流程简介
主要步骤如下:
- 编写 URDF 文件;
- 编写 launch 文件;
- 编辑配置文件;
- 编译;
- 执行 launch 文件并在 rviz2 加载机器人模型。
该案例中,C++ 与 Python 实现都遵顼上述流程,且大多数实现都基本一致,只是在配置文件上稍有差异,本节主要以 C++ 功能包为例演示该实现。
4.准备工作
1.安装所需功能包
请调用如下命令,安装案例所需的两个功能包:
sudo apt install ros-humble-joint-state-publisher
sudo apt install ros-humble-joint-state-publisher-gui
2.新建功能包
终端下进入工作空间的src目录,调用如下命令创建C++功能包。
ros2 pkg create cpp06_urdf --build-type ament_cmake
功能包下新建 urdf、rviz、launch、meshes目录以备用,其中 urdf 目录下再新建子目录 urdf 与 xacro,分别用于存储 urdf 文件和 xacro 文件。