1.5.6 多线激光雷达基本使用
同单线激光雷达一样,多线激光雷达的品牌型号同样琳琅满目,本节将以RoboSense速腾聚创的RS-LiDAR-32为例介绍多线激光雷达的基本使用。
RS-LiDAR-32是一款32线激光雷达,其基本使用流程如下:
- 软件安装与配置;
- 硬件准备与配置;
- 启动并测试。
1.软件安装与配置
(1)、进入工作空间的src目录,下载相关雷达驱动包,下载命令如下:
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
git clone https://github.com/RoboSense-LiDAR/rslidar_msg.git
进入rslidar_sdk并执行初始化与更新:
cd rslidar_sdk
git submodule init
git submodule update
(2)、安装Yaml
要求Yaml版本号至少是v0.5.2,如果安装的是ROS2的desktop-full,则可以跳过此步骤,否则自行安装,安装命令如下:
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
(3)、安装libpcap
要求libpcap版本号至少是 v1.7.4,安装命令如下:
sudo apt-get install -y libpcap-dev
(4)、修改配置文件
打开工程内的CMakeLists.txt文件,将文件顶部的变量COMPILE_METHOD改为COLCON。
#
=======================================
#
Compile setup (ORIGINAL,CATKIN,COLCON)
#
=======================================
set
(COMPILE_METHOD COLCON)
打开rslidar_sdk/config/config.yaml文件,并修改代码:
lidar_type: RSM1 #LiDAR type - RS16, RS32, RSBP, RSHELIOS, RSHELIOS_16P, RS128, RS80, RS48, RSP128, RSP80, RSP48,
# RSM1, RSM1_JUMBO, RSM2, RSE1
默认是RSM1,此处需要修改成RS32,当然具体型号需要视雷达而定。
除此之外,还需要将rslidar_sdk工程目录下的package_ros2.xml文件重命名为package.xml。
2.硬件准备与配置
在物理层面我们需要将激光雷达连接到机器人的控制系统。具体操作如下:
(1)、电源连接:在配备接口盒子一同使用的时候,设备供电要求电压范围9-32 VDC,推荐使用12VDC。如果不使用接口盒子给连接雷达的端子供电,必须使用经过稳压的12VDC,V2.0及以后版本雷达将宽压功能集成在雷达内部,所以可以使用9-32VDC直接给雷达供电;
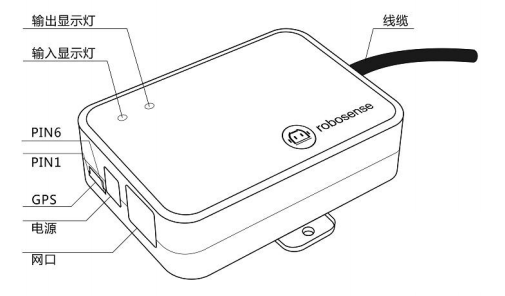
(2)、电气安装:RS-LiDAR使用航插接口,雷达侧面主机到航插头的线缆长度为1米,通过航插接口连接接口盒子;
(3)、通过网线连接接口盒子与机器人控制系统。
(4)、还需配置网络,把控制系统的ip设置为与设备同一网段(雷达ip地址默认为192.168.1.200),操作示例如下:

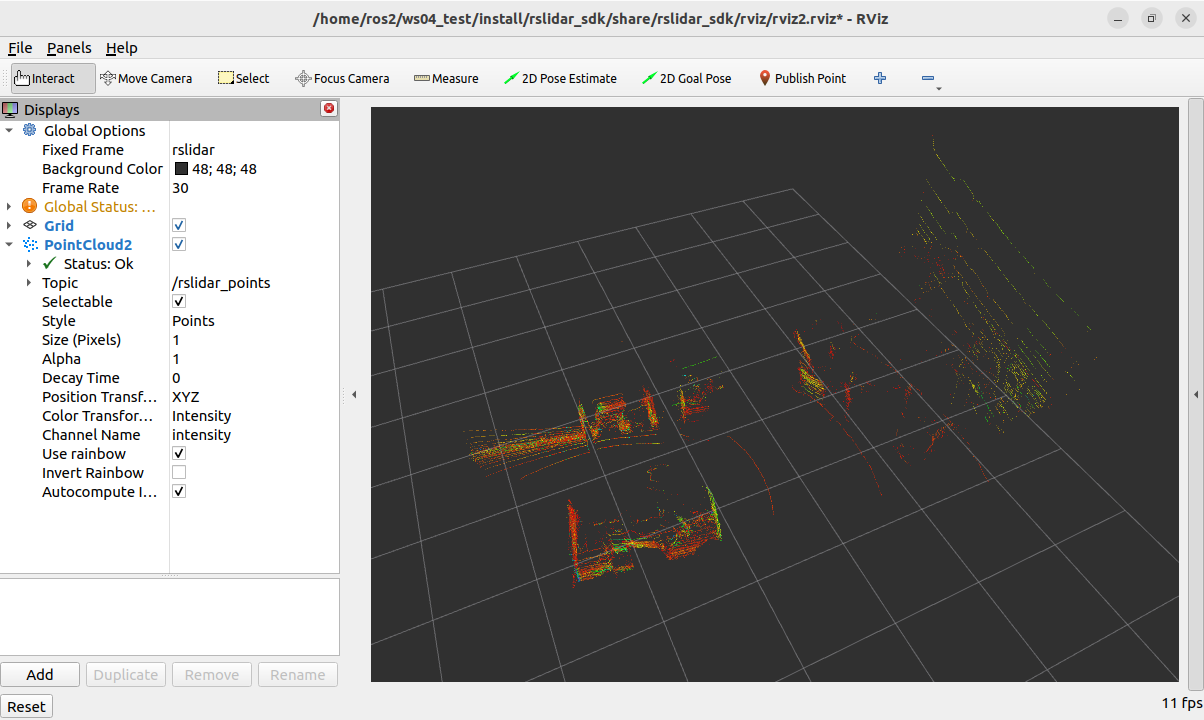
3.启动并测试
进入工作空间目录,执行以下命令即可编译、运行。
colcon build
source install/setup.bash
ros2 launch rslidar_sdk start.py
如果没有异常,那么会自动启动rviz2,并且在rviz2中显示激光雷达扫描的点云数据。