1.4.1 底盘基本使用
机器人底盘琳琅满目,但是其使用上大致相同,本节将以MyCar导航机器人底盘为例演示其基本使用,MyCar导航机器人根据底盘驱动类型的不同主要分为Arduino底盘与Stm32底盘两种类型,Arduino底盘为两轮差速底盘,Stm32底盘则包括两轮差速和四轮差速两种子类型。
本节将分别介绍Arduino底盘与Stm32底盘的具体使用。
1.准备工作
车辆底盘启动后,需要通过上位机进行控制,底盘与上位机的连接方式主要有两种:
- 方式1:直接通过数据线将底盘连接到电脑;
- 方式2:使用自带的上位机,并按照本教程第1.2节内容搭建远程开发环境。
无论采用哪种方式,都需要保证上位机已经按照本教程第1.3.1节内容进行了USB端口设置(如果是使用底盘自带的上位机,那么已经默认进行了配置),以确保上位机可以识别并操作外接的USB设备。
2.Arduino底盘使用
准备工作
在使用Arduino底盘之前,需要做如下准备工作(如果是使用底盘自带的上位机,该部分操作都已经默认实现)。
(1).硬件准备
通过USB数据线将机器人底盘连接到上位机,并打开底盘开关。上位机终端下执行指令:
ll /dev/ttyACM*
如正常,将输出类似如下的结果:
crw-rw---- 1 root dialout 166, 0 4月 27 20:15 /dev/ttyACM0
注意:如果物理连接无异常,Ubuntu系统显示无法访问 ‘/dev/ttyACM‘: 没有那个文件或目录,那么可能是brltty驱动占用导致的,可以运行sudo apt remove brltty然后重新插拔一下设备即可解决问题。
(2).系统准备
ros2_arduino_bridge是依赖于python-serial功能包的,请先在上位机安装该功能包,安装命令:
sudo pip install --upgrade pyserial
(3).软件安装
调用如下指令将此软件包下载到你的ROS2工作空间下的src目录:
git clone https://github.com/damuxt/ros2_arduino_bridge.git
(4).环境配置
终端下进入ros2_arduino_bridge/scripts,并执行指令:
bash create_udev_rules.sh
该指令将为Arduino端口绑定一个固定名称,重新将底盘与上位机连接,执行如下指令:
ll /dev | grep -i ttyACM
如正常,将输出类似如下的结果:
lrwxrwxrwx 1 root root 7 4月 27 20:16 myarduino -> ttyACM0
crwxrwxrwx 1 root dialout 166, 0 4月 27 20:16 ttyACM0
(5).构建功能包
工作空间下调用如下指令,构建功能包:
colcon build --packages-select ros2_arduino_bridge
使用流程
(1).配置参数
在功能包下提供了机器人底盘相关参数的配置文件ros2_arduino_bridge/params,参数内容可以自行修改(如果是初次使用,建议使用默认),该文件内容如下:
/ros2_arduino_node:
ros__parameters:
# pid 参数
Kd: 45
Ki: 0
Ko: 50
Kp: 8
accel_limit: 0.5 # 加速限制
base_controller_rate: 10
base_controller_timeout: 1.0
base_frame: base_footprint #基坐标系
baud: 57600 # 波特率
encoder_resolution: 3960
gear_reduction: 1
motors_reversed: false
port: /dev/myarduino # Arduino端口
rate: 50
timeout: 0.5
use_sim_time: false
wheel_diameter: 0.065 # 轮胎直径
wheel_track: 0.21 # 轮间距
max_vel_x: 0.18 # 最大线速度
min_vel_x: -0.18 # 最小线速度
max_vel_th: 0.8 # 最大角速度
min_vel_th: -0.8 # 最小角速度
(2).启动launch文件
工作空间下,调用如下指令启动launch文件:
ros2 launch ros2_arduino_bridge ros2_arduino.launch.py
(3).控制底盘运动
上位机上,启动键盘控制节点:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
接下来,就可以通过键盘控制机器人运动了。
3.Stm32底盘使用
准备工作
在使用Stm32底盘之前,需要做如下准备工作(如果是使用底盘自带的上位机,该部分操作都已经默认实现)。
(1).硬件准备
通过USB数据线将机器人底盘连接到上位机,并打开底盘开关。上位机终端下执行指令:
ll /dev/ttyUSB*
如正常,将输出类似如下的结果:
crw-rw---- 1 root dialout 166, 0 4月 27 20:15 /dev/ttyUSB0
PS:如果物理连接无异常,Ubuntu系统显示无法访问 ‘/dev/ttyUSB‘: 没有那个文件或目录,那么可能是brltty驱动占用导致的,可以运行sudo apt remove brltty然后重新插拔一下设备即可解决问题。
(2).软件安装
调用如下指令将此软件包下载到你的ROS2工作空间下的src目录:
git clone https://github.com/damuxt/ros2_stm32_bridge.git
(3).环境配置
终端下进入ros2_stm32_bridge/scripts,并执行指令:
bash create_udev_rules.sh
该指令将为STM32端口绑定一个固定名称,重新将底盘与上位机连接,执行如下指令:
ll /dev | grep -i ttyUSB
如正常,将输出类似如下的结果:
lrwxrwxrwx 1 root root 7 4月 27 20:16 mycar -> ttyUSB0
crwxrwxrwx 1 root dialout 166, 0 4月 27 20:16 ttyUSB0
(4).设置车辆类型
修改上位机用户目录下的 .bashrc 文件,在该文件中设置车辆类型,如果你使用的是两轮差速底盘,则添加如下语句:
export MYCAR_MODEL=stm32_2w
如果你使用的是四轮差速底盘,则添加如下语句:
export MYCAR_MODEL=stm32_4w
(5).构建功能包
工作空间下调用如下指令,构建功能包:
colcon build --packages-select ros2_stm32_bridge
使用流程
(1).配置参数
在功能包下params目录中提供了机器人底盘相关参数的配置文件,stm32_2w.yaml为两轮差速底盘的配置文件,stm32_4w.yaml为四轮差速底盘的配置文件,参数内容可以自行修改(如果是初次使用,建议使用默认)。
stm32_2w.yaml的文件内容如下:
/mini_driver:
ros__parameters:
base_frame: base_footprint
baud_rate: 115200
control_rate: 10
encoder_resolution: 44.0
kd: 30
ki: 0
kp: 25
maximum_encoding: 100.0
model_param_acw: 0.21
model_param_cw: 0.21
odom_frame: odom
port_name: /dev/mycar
qos_overrides:
/parameter_events:
publisher:
depth: 1000
durability: volatile
history: keep_last
reliability: reliable
/tf:
publisher:
depth: 100
durability: volatile
history: keep_last
reliability: reliable
reduction_ratio: 90.0
use_sim_time: false
wheel_diameter: 0.065
stm32_4w.yaml的文件内容如下:
/mini_driver:
ros__parameters:
base_frame: base_footprint
baud_rate: 115200
control_rate: 10
encoder_resolution: 44.0
kd: 30
ki: 0
kp: 25
maximum_encoding: 100.0
model_param_acw: 0.45
model_param_cw: 0.45
odom_frame: odom
port_name: /dev/mycar
qos_overrides:
/parameter_events:
publisher:
depth: 1000
durability: volatile
history: keep_last
reliability: reliable
/tf:
publisher:
depth: 100
durability: volatile
history: keep_last
reliability: reliable
reduction_ratio: 90.0
use_sim_time: false
wheel_diameter: 0.080
(2).启动launch文件
工作空间下,调用如下指令启动launch文件:
. install/setup.bash
ros2 launch ros2_stm32_bridge driver.launch.py
(3).控制底盘运动
上位机上,启动键盘控制节点:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
接下来,就可以通过键盘控制机器人运动了。
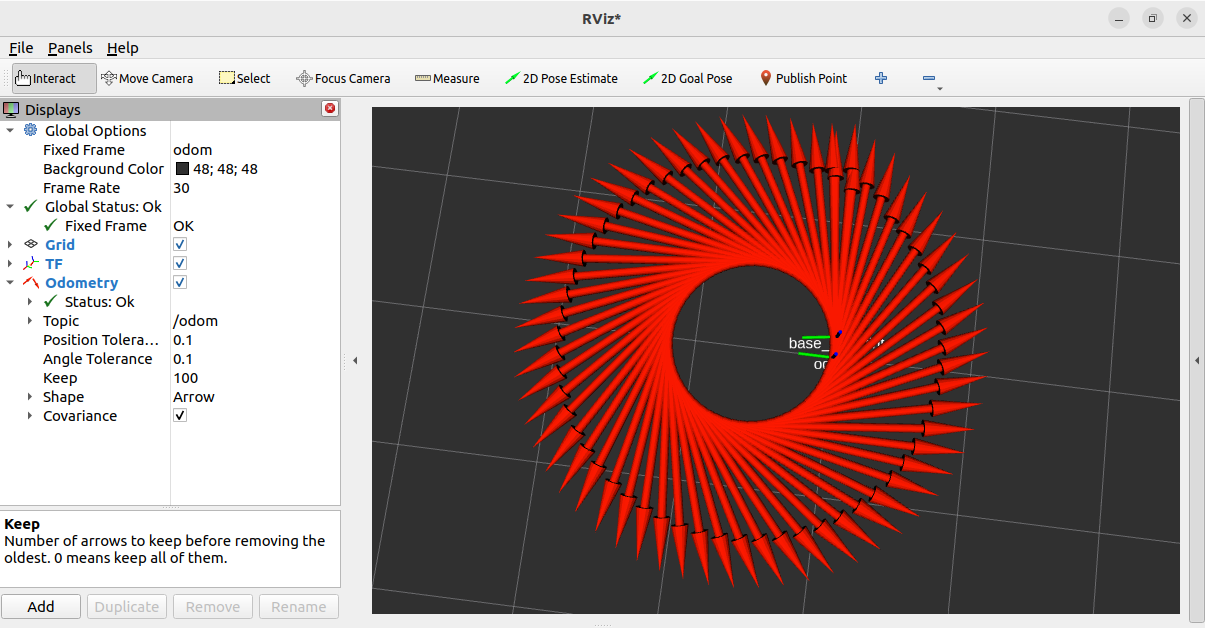
4.启动rviz2查看车辆里程计数据
不管是何种类型的底盘,在启动后都会发布一个比较重要的数据:里程计。我们可以在rviz2中查看里程计信息,启动rviz2后,相关操作如下:
- 将视图的参考坐标系(Fixed Frame)设置为odom;
- 添加TF插件;
- 添加Odometry插件,并将话题设置为odom。
使用键盘控制车辆运动时,就可以看到由Odometry插件显示的车辆的位姿信息了。