1.2.1 远程开发环境搭建_准备
1.ROS2准备
被远程连接的设备,首先需要保证安装了ROS2机器人操作系统,如前所述,机器人平台一般自带预装了ROS的控制系统。
另外控制系统的硬件载体是具有多样性的,常用的多是基于ARM、x86等架构的处理器,比如:PC、工控机、树莓派、NVIDIA Jetson...。不同的处理器都存在一定的优缺点,PC和工控机,处理器性能强大,但是功耗高、体积大、灵活性差,嵌入式系统则反之。对于我们而言,可以根据机器人平台的电气、载重、空间以及用途等诸多要素自主选择合适的控制系统。
无论选用何种处理器,只要是安装了ROS2,那么对于开发人员而言,在使用上,没有任何本质的区别,或者换言之,作为软件工程师,部分场景下无需关注于硬件的选型。
2.设置固定IP
远程连接时,不管使用何种工具,需要根据IP地址定位到被连接的主机,再通过账号和密码登录该主机,因此,我们需要先获取该IP地址。并且每次连接时,都需要使用到IP,为了保证连接的便利性和稳定性,最好将被连接主机的IP地址设置为固定IP,具体操作如下。
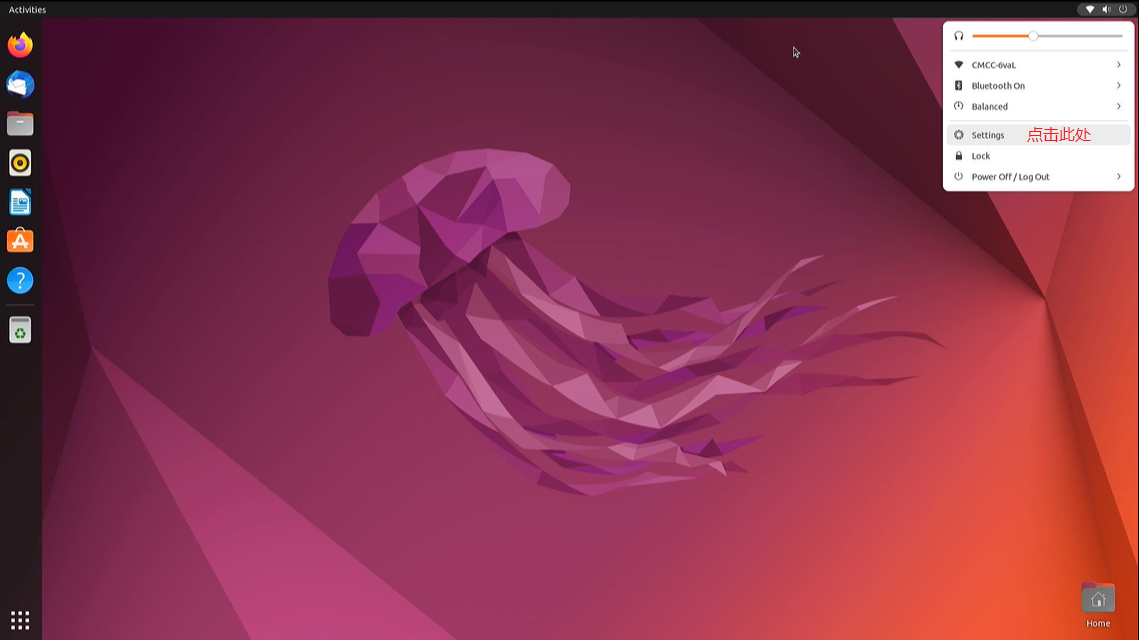
1.进入设置界面
启动被连接的主机(启动时需要连接显示器或使用HDMI采集卡,并且配置完SSH远程访问之后,可以不再使用显示器或HDMI采集卡),并进入设置界面。
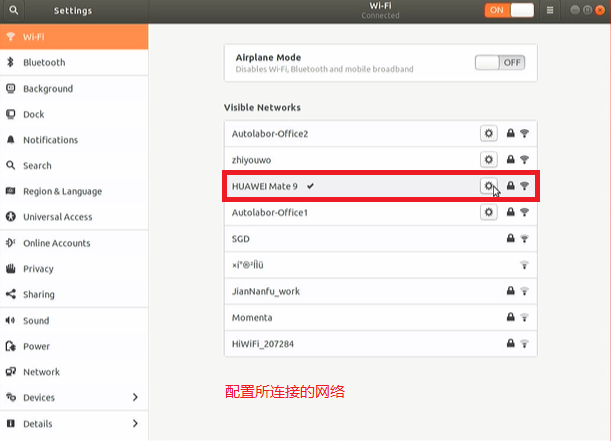
2.配置所连接的网络
3.设置固定IP
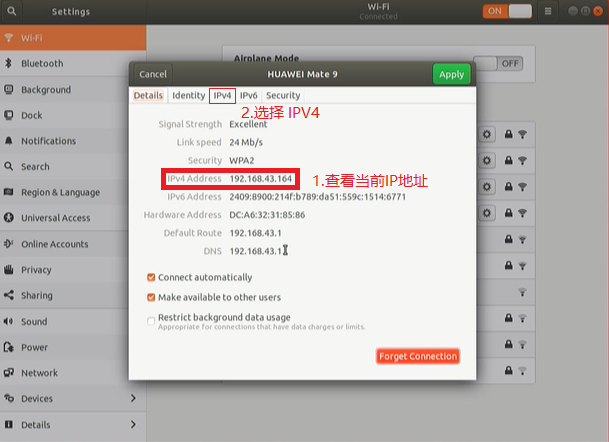
查看当前IP地址。
设置固定IP。
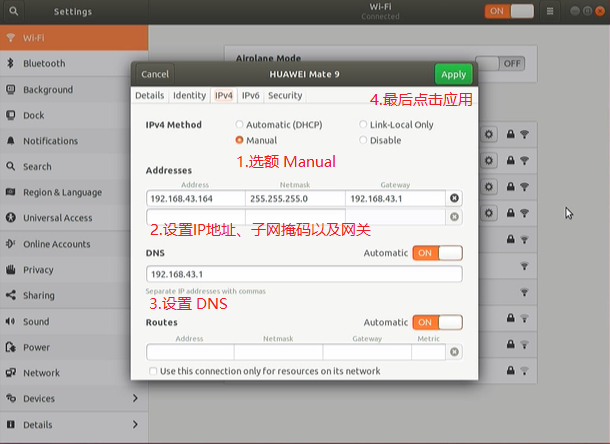
至此,IP配置完毕。