1.6.2 深度相机使用
深度相机的品牌型号也有很多,不同的深度相机使用也并不相同,本节将以奥比中光Pro Plus深度相机为例介绍其基本使用。

使用奥比中光Pro Plus深度相机的大致流程如下:
- 硬件准备;
- 软件安装;
- 启动并测试。
如果你使用的是其他深度相机,请参考对应的官方手册。
1.硬件准备
将深度相机连接到你的计算机(如果连接的是虚拟机,请注意相关设置)。
2.软件安装
(1).驱动准备
在课程配套资料中,复制文件夹ros2_astra_camera到你工作空间下的src目录。
(2).安装依赖
请调用如下指令安装相机驱动所依赖的功能包。
sudo apt install libgflags-dev nlohmann-json3-dev ros-humble-image-transport ros-humble-image-publisher
所安装的各功能包作用如下:
- libgflags-dev:一个命令行参数处理库,用于处理命令行参数的解析和管理。
- nlohmann-json3-dev:这是一个 JSON(JavaScript Object Notation)处理库,用于解析和生成 JSON 数据。
- ros-humble-image-transport:是 ROS 图像传输库,用于在 ROS 中传输图像数据。它提供了一些常见的图像传输方法和功能。
- ros-humble-image-publisher:是 ROS 图像发布者包,用于在 ROS 中发布图像数据。它可以将图像数据发布到 ROS 系统中的其他节点,以供其他节点订阅和处理。
(3).安装glog
glog 是 Google 的一个 C++ 日志库,旨在提供高效、易用的日志记录功能。可将该功能包安装在当前工作空间的src目录下,安装相关指令如下:
wget -c https://github.com/google/glog/archive/refs/tags/v0.6.0.tar.gz -O glog-0.6.0.tar.gz
tar -xzvf glog-0.6.0.tar.gz
cd glog-0.6.0
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfig
(4).安装magic_enum
magic_enum 是一个 C++ 的库,提供了对枚举类型的强大而方便的操作和反射支持。可将该功能包安装在当前工作空间的src目录下,安装相关指令如下:
wget -c https://github.com/Neargye/magic_enum/archive/refs/tags/v0.8.0.tar.gz -O magic_enum-0.8.0.tar.gz
tar -xzvf magic_enum-0.8.0.tar.gz
cd magic_enum-0.8.0
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfig
(5).安装libuvc
libuvc 是一个开源的跨平台的 USB 视频类库,用于在应用程序中与 USB 视频设备进行交互和视频数据的采集。可将该功能包安装在当前工作空间的src目录下,安装相关指令如下:
git clone https://github.com/libuvc/libuvc.git
cd libuvc
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfig
(6).端口绑定
执行功能包内置的脚本文件,以绑定端口。相关指令如下:
cd ros2_astra_camera/astra_camera/scripts
sudo bash install.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
执行完之后需要重新插拔一下USB接口。
(7).构建
进入工作空间构建一下功能包。
colcon build --packages-select astra_camera_msgs
colcon build --packages-select astra_camera
3.启动并测试
进入工作空间,执行如下指令启动launch文件:
source ./install/setup.bash
ros2 launch astra_camera astra_pro_plus.launch.py
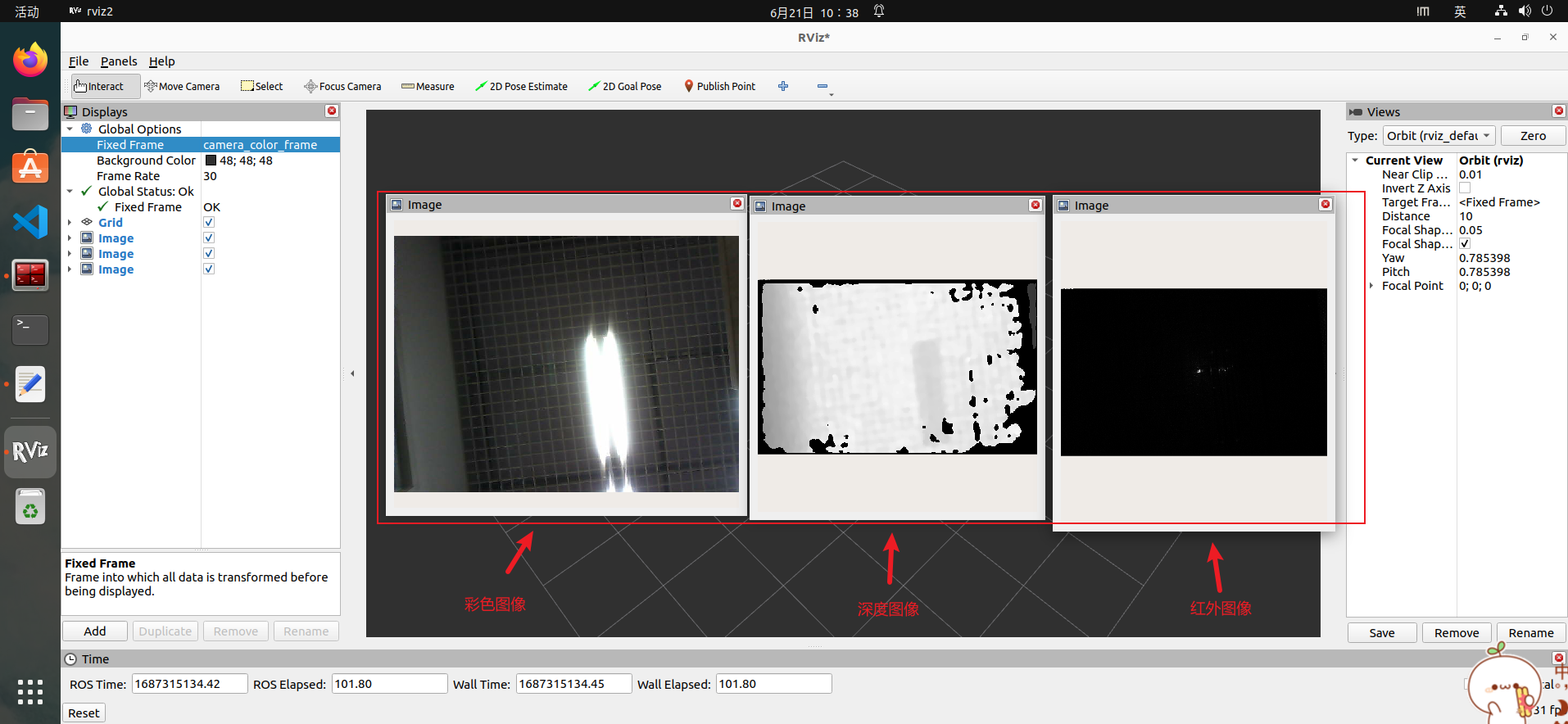
再启动rviz2查看运行结果。在rviz2中添加多个image插件,话题分别设置为camera/color/image_raw、camera/depth/image_raw、camera/ir/image_raw,就可以看到深度相机采集的彩色图像、深度图像以及红外图像了。